1 | 计数信号量具备两种操作动作,称为V(signal())与P(wait())(即部分参考书常称的“PV操作”)。V操作会增加信号量S的数值,P操作会减少它。 |
例题
例1
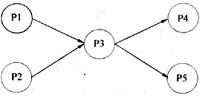
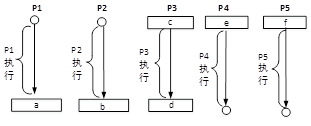
进程P1、P2、P3、P4和P5的前趋图如下所示:
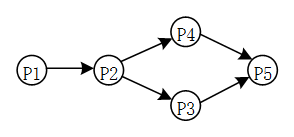
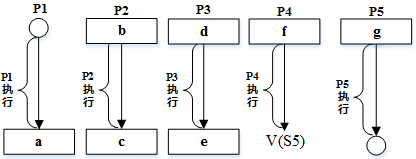
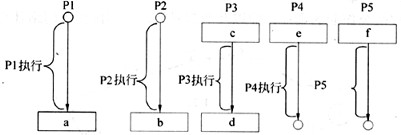
若用 PV操作 控制进程P1、P2、P3、P4 、P5并发执行的过程,则需要设置5个信号量S1、S2、S3、S4和S5,且信号量S1~S5的初值都等于零。下图中a、b 和c处应分别填写( );d和e处应分别填写( ),f和g处应分别填写( )。
问题1选项
A.V(S1)、P(S1)和V(S2)V(S3)
B.P(S1)、V(S1)和V(S2)V(S3)
C.V(S1)、V(S2)和P(S1)V(S3)
D.P(S1)、V(S2)和V(S1)V(S3)
问题2选项
A.V(S2)和P(S4)
B.P(S2)和V(S4)
C.P(S2)和P(S4)
D.V(S2)和V(S4)
问题3选项
A.P(S3)和V(S4)V(S5)
B.V(S3)和P(S4)P(S5)
C.P(S3)和P(S4)P(S5)
D.V(S3)和V(S4)V(S5)
解:
根据前驱图,$P_1$进程执行完需要通知$P_2$进程,故需要利用$V(S_1)$操作通知$P_2$进程,所以空 a 应填$V(S_1)$;
$P_2$ 进程需要等待$P_1$进程的结果,故需要利用 $P(S_1)$ 操作测试 $P_1$ 进程是否运行完,所以空 b 应填 $P(S_1)$;
又由于$P_2$进程运行结束需要利用$V(S_2)$、$V(S_3)$操作分别通知$P_3$、$P_4$进程,所以空 c应填 $V(S_2)$、$V(S_3)$。
例1-2
进程P1、P2、P3、P4和P5的前趋图如下所示:
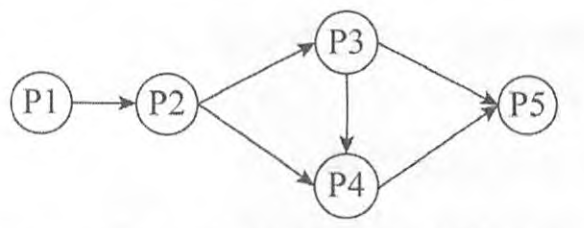
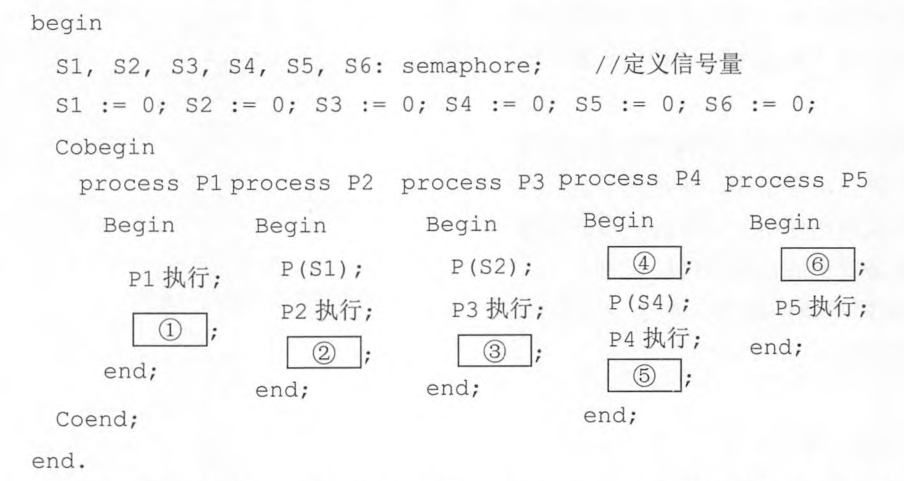
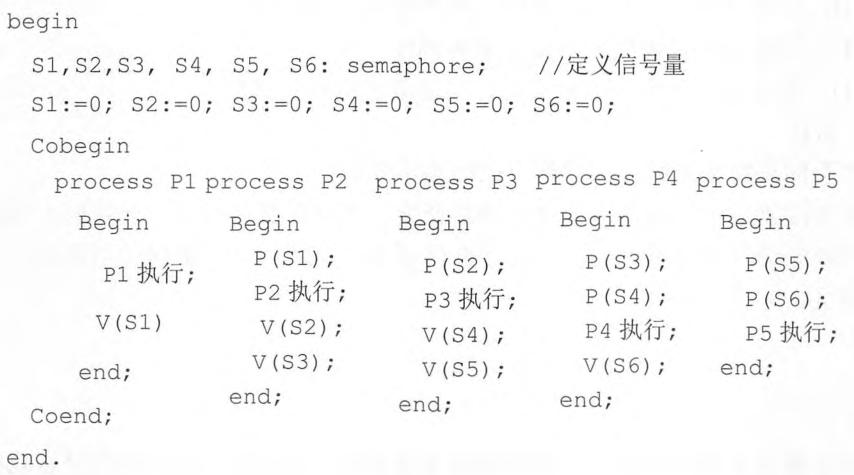
用 PV操作 控制这5个进程的同步与互斥的程序如下,程序中的空①和空②处应分别为( ),空③和空④处应分别为( ),空⑤和空⑥处应分别为( )。
问题1选项
A.V (S1)和P(S2)P (S3))
B.P(S1)和V(S1)V (S2))
C.V (S1)和V (S2)V (S3))
D.P (S1)和V(S1)P (S2))
问题2选项
A.V (S4)V (S5)和P(S3)
B.V (S3) V (S4)和V(S5)
C.P (S4)和P (S5)V (S5)
D.P(S4)和P(S5) V (S4)
问题3选项
A.P (S6)和P (S5) V (S6)
B.V (S5)和V (S5) V (S6)
C.P (S6)和P (S5)P (S6)
D.V (S6)和P (S5) P(S6)
解:
根据前驱图,P1进程运行完需要利用V操作V(S1)通知P2进程,所以空①应填 V (S1)。P2进程运行完需要利用V操作V(S2)、V(S3)分别通知P3、P4进程,所以空②应填V (S2) V (S3)。
根据前驱图,P3进程运行完需要利用V操作V(S4)、V(S5)分别通知P4、P5 进程,故空③应为填写V(S4)V(S5)。P4需要等待P2和P5进程的通知,需要执行2个Р操作,由于P4进程的程序中执行前有1个Р操作P(S4),故空④应为填写P(S3)。
根据前驱图,P4进程执行完需要通知P5进程,故P4进程应该执行1个V操作,即空⑤应填V(S6)。P5进程运行前需要等待P3和P4进程的通知,需要执行2个Р操作,故空⑥应填写P(S5)和P(S6)。
根据上述分析,用PV操作控制这6个进程的同步与互斥的程序如下:
例1-3
进程P1、P2、P3、P4、P5的前趋图如下:
若用PV操作控制进程并发执行的过程,则需要设置4个信号量S1、S2、S3和S4,且信号量初值都等于零。下图中a和b应分别填写( ),c和d应分别填写( ),e和f应分别填写( )。
A.P(S1)和P(S2)
B.P(S1)和V(S2)
C.V(S1)和V(S2)
D.V(S1)和P(S2)
例1-4
进程P1、P2、P3、P4和P5的前趋图如下:
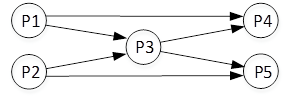
若用PV操作控制进程P1~P5并发执行的过程,则需要设置6个信号S1、S2、S3、S4、S5和S6,且信号量S1-S6的初值都等于零。下图中a和b处应分别填写( );c和d处应分别填写( ),e和f处应分别填写( )。
A. P(S1)P(S2)和P(S3)P(S4)
B. P(S1)V(S2)和P(S2)V(S1)
C. V(S1)V(S2)和V(S3)V(S4)
D. P(S1)P(S2)和V(S1)V(S2)
A. P(S1)P(S2)和V(S3)V(S4)
B. P(S1)P(S3)和V(S5)V(S6)
C. V(S1)V(S2)和P(S3)P(S4)
D. P(S1)V(S3)和P(S2)V(S4)
解:
本题主要考查用PV操作控制进程的并发执行。首先我们需要弄清楚前驱图中给出的各进制的执行顺序。从图中我们不难看出进程P1和P2没有前驱,也就是可以首先并发执行,而进程P3的前驱是P1和P2,P4的前驱是P1和P3,P5的前驱是P2和P3。那么怎么理解前驱呢?其实前驱就是指只有在前驱进程完成后,该进程才能开始执行
在本题的前驱图中我们不难看出,有6条路径,分别是P1->P3,P1->P4,P2->P3,P2->P5,P3->P4,P3->P5。而且题目也告诉我们分别有6初值为0个信号量(S1-S6),要我们用PV操作来控制进程P1~P5的并发执行。这里我们就需要清楚P与V这两种操作。
<
P原语的主要操作是:
总而言之,进行P操作的主要目的是阻塞某信号量上的进程,而进行V操作的主要目的是唤醒某信号量上的进程。
例2
若用PV操作来管理相关临界区,且信号量的值总是在[-2,1]之间变化,则( )
A.最多只有一个进程在相关临界区执行
B.至少有两个进程在等待进入相关临界区
C.相关临界区的个数最多2个
D.竞争相关临界区执行权的进程最多2个
解:
本题考查进程管理-进程同步。相关临界区:指并发进程中涉及到相同变量的那些临界区。对于若干个并发进程共享某一变量的相关临界区的管理有三个要求:(1)一次最多一个进程能够进入临界区;(2)不能让一个进程无限制地在临界区执行;(3)不能强迫一个进程无限制地等待进入它的临界区。
若用PV操作来管理相关临界区,且信号量的值总是在[-2,1]之间变化,则最多只有一个进程在相关临界区执行。故本题选A。
2-2
临界区是()。
A.一段共享数据区
B.一个缓冲区
C.一段程序
D.一个同步机制
解:
本题考查进程管理-进程同步。临界区指的是一个访问共用资源(例如:共用设备或是共用存储器)的程序片段,而这些共用资源又无法同时被多个线程访问的特性。当有线程进入临界区段时,其他线程或是进程必须等待(例如:bounded waiting等待法),有一些同步的机制必须在临界区段的进入点与离开点实现,以确保这些共用资源是被互斥获得使用。故本题选C。
参考:
前趋图(Precedence Graph) 是一个有向无环图,记为:→={(Pi,Pj )|Pi must complete before Pj may strat}。假设系统中进程P={P1,P2,P3,P4,P5,P6,P7,P8},且进程的前驱图如下:
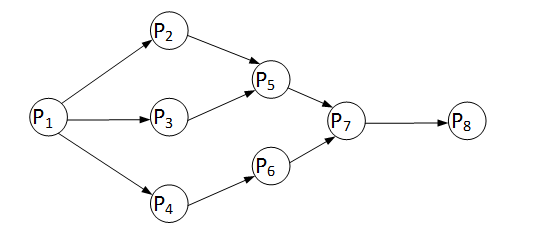
那么前驱图可记为:( )。
问题1选项
A.→={(P
2,P
1),(P
3,P
1),(P
4,P
1),(P
6,P
4),(P
7,P
5),(P
7,P
6),(P
8,P
7)}
B.→={(P
1,P
2),(P
1,P
3),(P
1,P
4),(P
2,P
5),(P
5,P
7),(P
6,P
7),(P
7,P
8)}
C.→={(P
1,P
2),(P
1,P
3),(P
1,P
4),(P
2,P
5),(P
3,P
5),(P
4,P
6),(P
5,P
7),(P
6,P
7),(P
7,P
8)}
D.→={(P
2,P
1),(P
3,P
1),(P
4,P
1),(P
5,P
2),(P
5,P
3),(P
6,P
4),(P
7,P
5), (P
7,P
6),(P
8,P
7)}
解:
原文链接: https://dashen.tech/2018/09/01/PV操作/
版权声明: 转载请注明出处.